

DC-DC 전원 공급 장치는 다양한 부하 조건에서 출력 안정성과 정밀도를 유지하기 위해 제어 루프가 필요합니다. 전통적으로 제어는 아날로그 구성요소를 사용하지만 점점 프로그래밍 가능성과 비용을 아끼기 위해 범용 마이크로컨트롤러(MCU)를 사용하는 디지털 솔루션으로 눈을 돌리고 있습니다.
마이크로컨트롤러는 디스플레이 컨트롤러, 원격 제어 및 상태 통신, 보안 및 안전 모니터링, 키패드 등과 같은 제어 루프 외에도 하나의 장치에 많은 기능을 결합할 수 있습니다.
그럼에도 불구하고 제어 루프 작업은 높은 스위칭 주파수에서 상당한 양의 프로세서 시간을 차지할 수 있으며 실시간 처리 제약으로 인해 우선 순위가 높아야 합니다. 실제로 루프는 하나의 스위칭 기간 내에 실행되어야 하며 그렇지 않으면 컨트롤러가 불안정해질 수 있습니다.
FMAC를 사용하면 컨트롤러 작업의 일부, 즉 디지털 보정기가 오프로드(Off-load)되어 다른 작업을 위한 프로세서 시간을 확보할 수 있습니다. 보상기는 컨트롤러가 안정적으로 유지되도록 충분히 높은 위상 및 이득 마진을 보장합니다. 일반적으로 FIR 구현에 비해 낮은 차수의 필터로도 주파수에 대해 가파른 위상 기울기를 달성하는 IIR 필터로 만들어집니다.
이 예는 동기식 벅 컨버터용 전압 모드 컨트롤러를 구현합니다. 보상기는 3극 3제로(3p3z) IIR 필터입니다. 예제 코드는 디스커버리 키트(B-G474E DPOW1)에서 실행됩니다.
이 코드는 STM32CubeG4 MCU 패키지 펌웨어의 STM32G4xx-HAL-Driver 라이브러리를 사용합니다.
Synchronous buck converter
벅 컨버터 회로도는 그림 9에 나와 있습니다.

그림 9
트랜지스터 S1 및 S2는 스위치 역할을 하며 역상으로 작동합니다. S1이 닫히고 S2가 열리면 꾸준히 증가하는 전류가 전원 VS에서 S1과 인덕터 L을 통해 충전 커패시터 C로 흐릅니다. 시간 T1 후에 스위치 S1이 열리고 S2가 닫힙니다.
L을 통한 전류는 계속 흐르지만 이제는 스위치 S2를 통해 접지에서 공급되고 꾸준히 감소합니다. 시간 T2 후에 S2는 다시 열리고 S1은 닫힙니다.
S1 및 S2의 게이트는 고정 기간 T1+T2 및 가변 듀티 사이클 T1/(T1+T2)를 갖는 상보적 구형파에 의해 구동됩니다(그림 10. 벅 컨버터 파형 참조).
이를 PWM(펄스 폭 변조) 신호라고 합니다. T1을 늘리고 T2를 줄이면 L을 통한 전류가 증가하여 커패시터 C를 더 높은 전압으로 충전할 수 있습니다.
T1을 줄이고 T2를 증가시키면 L을 통한 전류와 C의 전압이 감소합니다. 따라서 벅 컨버터의 출력 전압은 PWM 신호의 듀티 사이클을 제어하여 조정할 수 있습니다.

그림 10
Digital controller
다양한 공급(라인) 및 부하 조건에서 일정한 출력 전압을 유지하려면 PWM 듀티 사이클을 지속적으로 조정해야 합니다.
저항 R1,R2로 나누어진 출력 전압은 컨트롤러를 통해 피드백되어 듀티 사이클을 조정합니다. 이 전압 제어 루프는 마이크로컨트롤러에서 구현됩니다. 아날로그-디지털 변환기(ADC)로 구성되며, 이 변환기의 출력은 기준(Reference)에서 차감됩니다.
기준(Reference)은 목표 출력 전압에 해당하는 ADC 값입니다. 따라서 빼기 결과는 실제 출력 전압과 예상 전압 사이의 오차를 나타냅니다.
증폭 및 보상 후 이 오류는 스위치 S1 및 S2를 제어하는 데 사용되는 PWM 신호의 듀티 사이클을 설정합니다. 양의 오류(REF > ADC 출력)는 출력 전압이 목표보다 낮고 듀티 사이클이 증가해야 함을 의미합니다. 음의 오류는 출력의 과전압 상태를 나타내며 듀티 사이클을 줄여야 합니다.
A-to-D 변환 및 PWM 단계는 ADC 및 고해상도 타이머(HRTIM) 하드웨어 블록을 사용하여 마이크로컨트롤러에서 구현됩니다. 중간 단계는 일반적으로 소프트웨어에서 수행됩니다. 그러나 여기에 제시된 예에서 FMAC는 보정기를 구현하는 데 사용되는 반면 기준 차감 및 증폭은 ADC에 포함됩니다.
소프트웨어는 PWM에 대한 보상기 출력을 조절하는 데만 필요합니다. ADC의 출력은 DMA를 통해 FMAC 입력으로 직접 전송할 수 있습니다. 다양한 마이크로컨트롤러 기능 유닛을 통한 샘플 흐름은 그림 11. 컨트롤러 기능 다이어그램에 나와 있습니다.
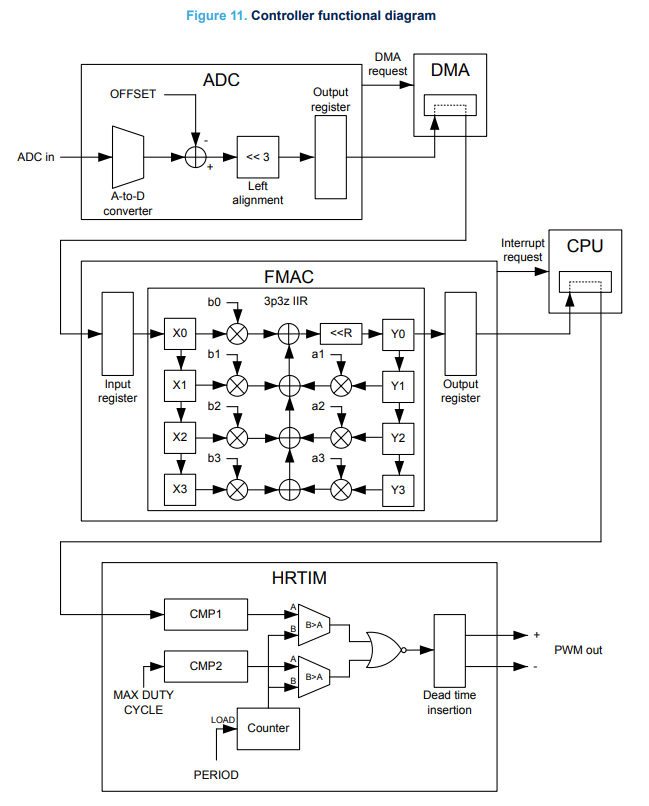
그림 11
<계속>
'▶ STM32 > Peripheral' 카테고리의 다른 글
| FMAC 디지털 필터 구현 방법 (with the STM32 G4 MCU Package)(6) - 3p3z code (0) | 2023.12.29 |
|---|---|
| FMAC 디지털 필터 구현 방법 (with the STM32 G4 MCU Package)(5) - 3p3z (2) | 2023.12.29 |
| FMAC 디지털 필터 구현 방법 (with the STM32 G4 MCU Package)(3) - FIR filter (0) | 2023.12.29 |
| FMAC 디지털 필터 구현 방법 (with the STM32 G4 MCU Package)(2) - FIR adaptive (0) | 2023.12.29 |
| FMAC 디지털 필터 구현 방법 (with the STM32 G4 MCU Package)(1) (0) | 2023.12.29 |